


坐標(biāo)轉(zhuǎn)換中的七參數(shù)詳談,測量員值得收藏
坐標(biāo)轉(zhuǎn)換永遠(yuǎn)是測繪工作離不開的一個話題。坐標(biāo)轉(zhuǎn)換的方法很多,有的方法可以用相應(yīng)的參數(shù)來描述,其中使用較廣的一個是七參數(shù)。七參數(shù)大多用于不同坐標(biāo)系統(tǒng)間的基準(zhǔn)變換。
七參數(shù)的由來
對于非測繪的專業(yè)人士可能不太能理解“基準(zhǔn)”這個詞語。簡單的理解就是坐標(biāo)數(shù)值的零點,比如空間坐標(biāo)的原點,再比如大地坐標(biāo)的起算面。定義一個坐標(biāo)系的三個基本要素是原點、指向、尺度。原點即坐標(biāo)系的原點,指向即坐標(biāo)軸的指向,尺度即長度單位和橢球。由于各個坐標(biāo)系,或者說定義坐標(biāo)系的組織所確定的這三個要素都有所區(qū)別,這就產(chǎn)生基準(zhǔn)的變換,并且使用七參數(shù)在空間坐標(biāo)中進(jìn)行基準(zhǔn)變換。
在空間坐標(biāo)中進(jìn)行基準(zhǔn)變換")
什么是七參數(shù),又有哪七個參數(shù)呢?
七參數(shù)主要分為3類參數(shù),旋轉(zhuǎn)、縮放和平移。縮放,表示為k,主要是由于測量誤差產(chǎn)生的;平移為3個坐標(biāo)軸方向上的平移,表示為dX、dY、dZ,這是由于原點不一樣產(chǎn)生的;旋轉(zhuǎn)為3個坐標(biāo)軸的旋轉(zhuǎn),表示為rX、rY、rZ,這是坐標(biāo)軸指向不一致產(chǎn)生的。
值得注意的是,旋轉(zhuǎn)存在方向的問題;不同的軟件,或者說不同地域的人的習(xí)慣差異,致使旋轉(zhuǎn)方向不一致,比如南方集團(tuán)與天寶七參數(shù)旋轉(zhuǎn)方向一致,但與ArcGIS的就相反。因此同一個七參數(shù)在不同軟件中使用時需要考慮旋轉(zhuǎn)方向的問題,適當(dāng)?shù)臅r候做相應(yīng)的變換才能完成正確的坐標(biāo)轉(zhuǎn)換,即旋轉(zhuǎn)方向定義相反時,旋轉(zhuǎn)角取其相反數(shù)。
平移的單位為對應(yīng)的長度單位,我們常用米;旋轉(zhuǎn)的單位為秒,原因是各個坐標(biāo)系間指向的差異都很小;縮放的單位是PPM(part(s) per million,百萬分之一),也就是說縮放是一個特別小的數(shù)值,這是因為坐標(biāo)轉(zhuǎn)換前我們都會率先統(tǒng)一單位,所以縮放數(shù)值也就體現(xiàn)了測量誤差等因素的影響。
的長度單位")
七參數(shù)的應(yīng)用
參數(shù)的應(yīng)用過程細(xì)分為旋轉(zhuǎn)、縮放、平移三個過程。這三個過程的順序是如何的,我們來看一下公式:
、縮放、平移公式")
簡化為:
![]()
上式中,X1為原始空間坐標(biāo),X2為目標(biāo)空間坐標(biāo),K為縮放,R為旋轉(zhuǎn),dX為平移。
可以看出,該順序是先旋轉(zhuǎn),再縮放,最后平移。當(dāng)然與之相反的是先平移,再縮放,最后旋轉(zhuǎn),這是一個可逆的過程,方便了兩個空間坐標(biāo)來回的轉(zhuǎn)換。這里為了方便說明,我們將旋轉(zhuǎn)、縮放、平移定義為七參數(shù)的正應(yīng)用;平移、縮放、旋轉(zhuǎn)定義為七參數(shù)的反應(yīng)用。
我們可以看看EPSG對一個坐標(biāo)系定義:
+proj=longlat+ellps=krass+towgs84=28,-121,-77,0,0,0,0
其中七參數(shù)作為基準(zhǔn)的定義,叫做towgs84,字面理解是轉(zhuǎn)換到wgs84所需的七參數(shù),作用同樣是為了不同坐標(biāo)系間的基準(zhǔn)變換。EPSG在進(jìn)行基準(zhǔn)轉(zhuǎn)換前必須要說明原始的towgs84和目標(biāo)的towgs84兩個七參數(shù)。
那么問題來了!
兩個七參怎么進(jìn)行基準(zhǔn)變換呢?為什么和WGS84有關(guān)系呢?在對比我們的熟悉的工程之星和SGO的坐標(biāo)轉(zhuǎn)換,通常都只有使用一個七參的情況,這又如何理解呢?
首先,工程之星和SGO大多的轉(zhuǎn)換場景都是WGS84坐標(biāo)轉(zhuǎn)換到XIAN80、Beijing54、CGCS2000等坐標(biāo),這里使用的七參數(shù)是原始坐標(biāo)系直接到目標(biāo)坐標(biāo)系的七參數(shù);而EPSG定義的七參數(shù)(基準(zhǔn))是坐標(biāo)系本身轉(zhuǎn)換到WGS84坐標(biāo)的七參數(shù),只要兩個坐標(biāo)系都知道如何轉(zhuǎn)換到WGS84坐標(biāo),其實就間接的知道這兩個坐標(biāo)系間的基準(zhǔn)變換。
至于為什么是WGS84,這是歷史原因造成的。因為WGS84是最先建立起來的全球坐標(biāo)系統(tǒng),衛(wèi)星定位大多得到的是WGS84的空間或者大地坐標(biāo),為了能轉(zhuǎn)換為自己的定義坐標(biāo)系下的坐標(biāo),都需要自身建立與WGS84的關(guān)系。
最后一問題,EPSG如何用兩個七參數(shù)進(jìn)行基準(zhǔn)變換。回到之前七參數(shù)的正反應(yīng)用問題,原始坐標(biāo)系的towgs84將原始坐標(biāo)轉(zhuǎn)換為WGS84的坐標(biāo)(以下簡稱84坐標(biāo)),這里是正應(yīng)用。得到84坐標(biāo)后使用目標(biāo)坐標(biāo)系的towgs84得到最終的坐標(biāo),這里是反應(yīng)用。其實我們的工程之星和SGO坐標(biāo)轉(zhuǎn)換的原始坐標(biāo)系和目標(biāo)坐標(biāo)系都可以指定七參數(shù),只是使用的頻率較低常被我們忽略。但與前述的過程相反,原始坐標(biāo)系的七參數(shù)是反應(yīng)用,目標(biāo)坐標(biāo)系的七參數(shù)是正應(yīng)用。隨著我們南方的發(fā)展壯大以及與國際的進(jìn)一步接軌,使用兩個七參數(shù)進(jìn)行基準(zhǔn)變換的場景會越來越多,比如我們的新軟件GIStar,我們需要好好的理解其原理和過程,同時清楚現(xiàn)有功能和新功能的差異,使坐標(biāo)轉(zhuǎn)換更加得心應(yīng)手。
原理")
七參數(shù)的細(xì)節(jié)
與towgs84相反的是fromwgs84,在旋轉(zhuǎn)和縮放很小的前提下,兩者互為相反數(shù)。fromwgs84可以參考天寶的坐標(biāo)轉(zhuǎn)換工具。如何區(qū)別towgs84和fromwgs84呢,其實很好理解,七參數(shù)正應(yīng)用使非84坐標(biāo)轉(zhuǎn)換為84坐標(biāo),那么該七參數(shù)為towgs84;七參數(shù)正應(yīng)用使84坐標(biāo)轉(zhuǎn)換為非84坐標(biāo),那么該參數(shù)為fromwgs84。我們工程之星和SGO以wgs84為原坐標(biāo)系的轉(zhuǎn)換場景,其使用的七參數(shù)都為fromwgs84。
回到前面提到的公式,該場景下X1為84坐標(biāo),X2為非84坐標(biāo),例如XIAN80,那么k、R和dX組成的七參數(shù)為fromwgs84,X2與X1調(diào)換,則為towgs84。
調(diào)換")
七參數(shù)的求解
求解7個參數(shù),我們至少需要7個方程,一對空間坐標(biāo)可以列3個方程,也就是說我們需要至少3對點,通過最小二乘的方法解算出七參數(shù)。當(dāng)然點的數(shù)量也是有講究,不是剛好3個點就好,也不是點越多越好,具體需要參考實際情況。
七參數(shù)作為基準(zhǔn)變換的工具,其適用較大的區(qū)域乃至全球,我們需要在該區(qū)域選擇均勻分布的控制點來求解七參數(shù)。小區(qū)域所求解的七參數(shù)是不適用的。這里再提一下towgs84和fromwgs84,原為非84坐標(biāo),目標(biāo)為84坐標(biāo),所求得的七參數(shù)為fromwgs84,相反則為towgs84。
以上為坐標(biāo)轉(zhuǎn)換七參數(shù)的介紹,希望對大家有所幫助。
更多相關(guān)

30余年測繪行業(yè)經(jīng)驗!南京環(huán)球測繪儀器公司介紹
南京環(huán)球測繪儀器有限公司成立于1993年,擁有30余年測繪行業(yè)經(jīng)驗。公司集測繪儀器銷售、維修、檢定、租賃、技術(shù)咨詢服務(wù)、工程測量測繪服務(wù)于一體,是目前國內(nèi)江蘇...
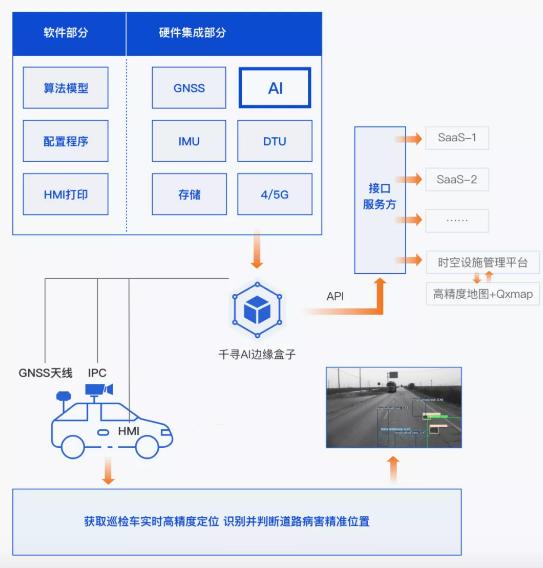
效率提升40倍,北斗+AI定義道路養(yǎng)護(hù)新標(biāo)準(zhǔn)
新基建背景下,圍繞AI打造的新應(yīng)用不斷涌現(xiàn),AI道路巡檢便是其中之一。 千尋位置依托北斗高精度定位、地理信息采集、視頻圖像對比識別、公路專題地圖三維可視化等技術(shù)手段,打造AI道路巡檢解決方案,...

2019年科力達(dá)測繪儀器全國戰(zhàn)略合作聯(lián)盟峰會舉行
2019年科力達(dá)全國戰(zhàn)略合作聯(lián)盟峰會在廣州舉行,時值科力達(dá)成立十五周年之際,會議現(xiàn)場高朋滿座,回首十五載春秋,全面布局,合力共贏2019。南方集團(tuán)創(chuàng)始人、總經(jīng)理馬超,南方集團(tuán)副總經(jīng)理馬然,北京三鼎...
北斗高精度定位導(dǎo)航系統(tǒng)不久將實現(xiàn)民用
作為一個從一出生就注定要走向?qū)こ0傩占业摹皣仄鳌保袊l(wèi)星導(dǎo)航系統(tǒng)“北斗”何時用、誰能用、怎么用等問題一直備受矚目。也因此,1月12日,在“北斗”衛(wèi)星又一次成功飛天,拉開2018年高密度發(fā)射序...

思拓力S6II全能型RTK
思拓力S6II應(yīng)用第二代RTK平臺、第四代傾斜測量技術(shù);思拓力GNSS產(chǎn)品線內(nèi)高端型號;小巧機(jī)身鎂合金材質(zhì);彩色觸控屏幕、全新界面引導(dǎo)式操作;超長續(xù)航保證,13600mAh智能鋰電池; S6II...

2021胡潤世界500強(qiáng)發(fā)布!海克斯康上榜
在2021年公布的《2021嘉興·胡潤世界500強(qiáng)》榜單中,海克斯康以2433億人民幣估值榮登484位,類屬軟件工業(yè)領(lǐng)域。“胡潤世界500強(qiáng)”上榜...

徠卡GeoMoS CH自動化監(jiān)測系統(tǒng)在深圳地鐵1號線西鄉(xiāng)站的應(yīng)用
深圳地鐵1號線是中國廣東省深圳市第一條建成運營的地鐵線路。一期工程于2004年12月28日通車試運營,二期工程(西延線)于2011年6月15日通車試運營。1號線東起羅湖區(qū)羅湖站,途經(jīng)福田區(qū)和南山區(qū)...

北斗和GPS能有什么結(jié)果——解讀中美導(dǎo)航系統(tǒng)合作
12月上旬,中美雙方簽署《北斗與GPS信號兼容與互操作聯(lián)合聲明》(以下簡稱《聲明》),兩大衛(wèi)星導(dǎo)航系統(tǒng)將實現(xiàn)民用信號互操作。 消息傳出后,引起部分讀者不解:兼容有何意義?是否意味著北斗將技術(shù)拱手...
 環(huán)球測繪微信
環(huán)球測繪微信